ZLTECH 3ფაზიანი 60მმ Nema24 24V 100W/200W/300W/400W 3000RPM BLDC ძრავა საბეჭდი მანქანისთვის








ჯაგრისების გარეშე DC ელექტროძრავა (BLDC) არის ელექტროძრავა, რომელიც იკვებება პირდაპირი დენის ძაბვის მიწოდებით და ცვლის ელექტრონულად, ნაცვლად ჯაგრისებით, როგორც ჩვეულებრივ DC ძრავებში.BLDC ძრავები დღესდღეობით უფრო პოპულარულია, ვიდრე ჩვეულებრივი DC ძრავები, მაგრამ ამ ტიპის ძრავების განვითარება შესაძლებელი იყო მხოლოდ 1960-იანი წლებიდან, როდესაც განვითარდა ნახევარგამტარული ელექტრონიკა.
BLDC და DC ძრავების მსგავსება
ორივე ტიპის ძრავა შედგება სტატორისგან, რომელსაც აქვს მუდმივი მაგნიტები ან ელექტრომაგნიტური ხვეულები გარედან და როტორი ხვეული გრაგნილით, რომელიც შეიძლება იკვებებოდეს შიგნიდან პირდაპირი დენით.როდესაც ძრავა იკვებება პირდაპირი დენით, სტატორში შეიქმნება მაგნიტური ველი, რომელიც იზიდავს ან მოგერიებს მაგნიტებს როტორში.ეს იწვევს როტორის ბრუნვის დაწყებას.
როტორის ბრუნვის შესანარჩუნებლად საჭიროა კომუტატორი, რადგან როტორი გაჩერდება, როდესაც ის შეესაბამება სტატორის მაგნიტურ ძალებს.კომუტატორი მუდმივად ცვლის მუდმივ დენს გრაგნილების მეშვეობით და, შესაბამისად, ცვლის მაგნიტურ ველსაც.ამ გზით, როტორს შეუძლია განაგრძოს ბრუნვა მანამ, სანამ ძრავა იკვებება.
განსხვავებები BLDC და DC ძრავები
ყველაზე მნიშვნელოვანი განსხვავება BLDC ძრავასა და ჩვეულებრივ DC ძრავას შორის არის კომუტატორის ტიპი.DC ძრავა ამ მიზნით იყენებს ნახშირბადის ჯაგრისებს.ამ ფუნჯების მინუსი არის ის, რომ ისინი სწრაფად აცვიათ.სწორედ ამიტომ BLDC ძრავები იყენებენ სენსორებს - ჩვეულებრივ ჰოლის სენსორებს - როტორის პოზიციის გასაზომად და მიკროსქემის დაფის, რომელიც ფუნქციონირებს როგორც გადამრთველი.სენსორების შეყვანის გაზომვები მუშავდება მიკროსქემის დაფის მიერ, რომელიც ზუსტად აჯერებს როტორის ბრუნვისას სწორ მომენტს გადაადგილებისთვის.
Პარამეტრები
| ელემენტი | ZL60DBL100 | ZL60DBL200 | ZL60DBL300 | ZL60DBL400 |
| ფაზა | 3 ფაზა | 3 ფაზა | 3 ფაზა | 3 ფაზა |
| ზომა | ნემა24 | ნემა24 | ნემა24 | ნემა24 |
| ძაბვა (V) | 24 | 24 | 48 | 48 |
| ნომინალური სიმძლავრე (W) | 100 | 200 | 300 | 400 |
| რეიტინგული მიმდინარეობა (A) | 5.5 | 11.5 | 8.3 | 12 |
| პიკური დენი (A) | 16.5 | 34.5 | 25 | 36 |
| რეიტინგული ბრუნვის მომენტი (Nm) | 0.32 | 0.63 | 0.96 | 1.28 |
| მაქსიმალური ბრუნვის მომენტი (Nm) | 1 | 1.9 | 3 | 3.84 |
| რეიტინგული სიჩქარე (RPM) | 3000 | 3000 | 3000 | 3000 |
| პოლუსების რაოდენობა (წყვილი) | 4 | 4 | 4 | 4 |
| წინააღმდეგობა (Ω) | 0.22±10% | 0.59±10% | 0.24±10% | |
| ინდუქციურობა (mH) | 0.29±20% | 0.73±20% | 0.35±20% | |
| Ke (RMS) (V/RPM) | 4.2x10-3 | 4.2x10-3 | 8.3x10-3 | 8.5x10-3 |
| როტორის ინერცია (კგ. სმ²) | 0.24 | 0.48 | 0.72 | 0.96 |
| ბრუნვის კოეფიციენტი (Nm/A) | 0.06 | 0.06 | 0.09 | 0.12 |
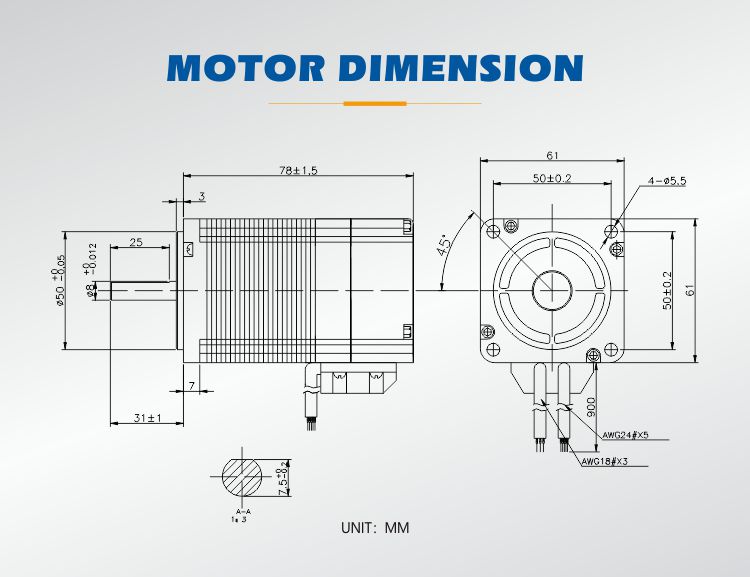
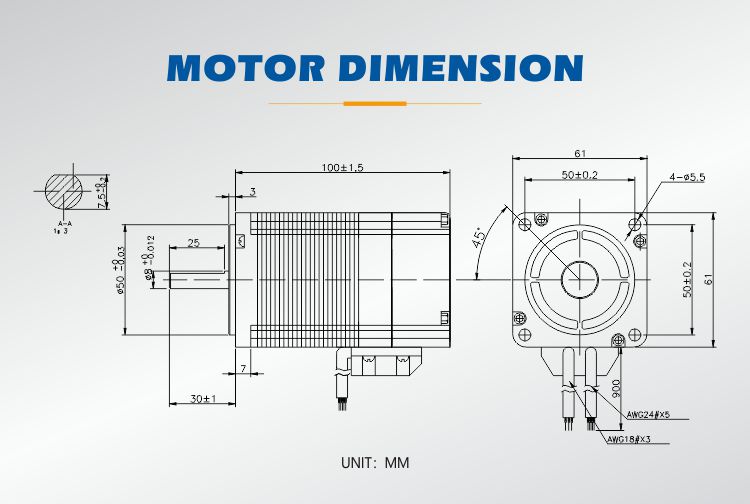
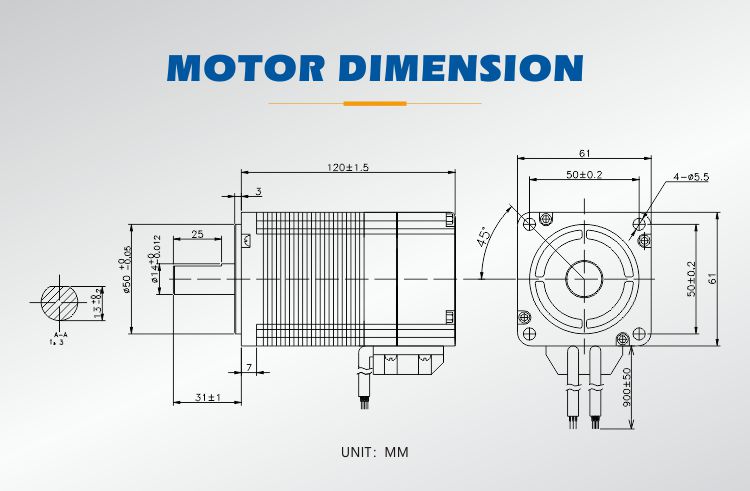
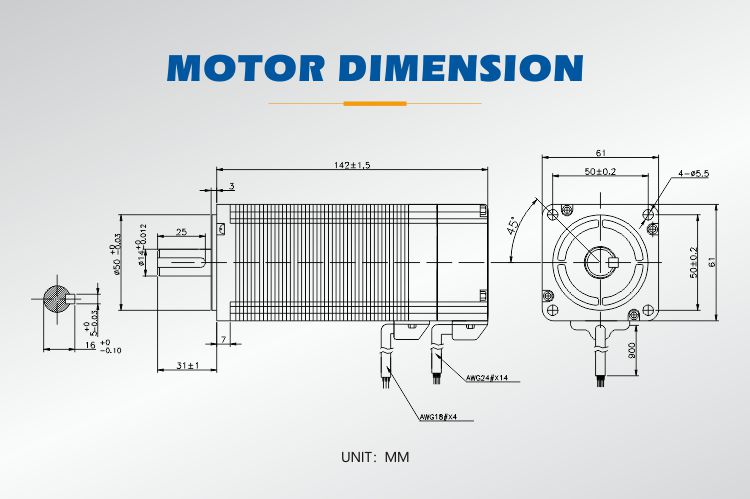
| ლილვის დიამეტრი (მმ) | 8 | 8 | 14 | 14 |
| ლილვის სიგრძე (მმ) | 31 | 30 | 31 | 31 |
| ძრავის სიგრძე (მმ) | 78 | 100 | 120 | 142 |
| წონა (კგ) | 0.85 | 1.25 | 1.5 | 2.05 |
| ადაპტირებული BLDC დრაივერი | ZLDBL5010S | ZLDBL5015 | ZLDBL5010S | ZLDBL5015 |
განზომილება
განაცხადი

შეფუთვა

წარმოების და ინსპექტირების მოწყობილობა

კვალიფიკაცია და სერტიფიცირება

ოფისი და ქარხანა

თანამშრომლობა

პროდუქტების კატეგორიები
-

DM4022 ZLTECH 24V-50V DC 0.3A-2.2A სტეპერ საფეხური...
-
M4040 ZLTECH 2 ფაზა 12V-40V DC 0.5A-4.0A ფუნჯი...
-

ZLTECH Nema17 0.5/0.7Nm 18V-36V ინტეგრირებული საფეხური...
-

ZLAC8030L ZLTECH 20V-60V 60A CANOPEN RS485 DC s...
-

ZLTECH 24V-36V 5A DC ელექტრო Modbus RS485 brus...
-

ZLTECH 57 მმ Nema23 24VDC 1000-დახურული მარყუჟის ...





