ZLTECH 24V-48V DC 30A CAN RS485 სერვოძრავის კონტროლერის დრაივერი CNC აპარატისთვის





სერვო დრაივერი თანამედროვე მოძრაობის კონტროლის მნიშვნელოვანი ნაწილია და ფართოდ გამოიყენება ავტომატიზაციის მოწყობილობებში, როგორიცაა სამრეწველო რობოტები და CNC დამუშავების ცენტრები.სერვო მამოძრავებელი ტექნოლოგია, როგორც CNC ჩარხების, სამრეწველო რობოტების და სხვა სამრეწველო ტექნიკის კონტროლის ერთ-ერთი მთავარი ტექნოლოგია, ბოლო წლებში ფართო ყურადღებას იპყრობს.
სერვო დრაივერი იყენებს ციფრული სიგნალის პროცესორს (DSP), როგორც საკონტროლო ბირთვს, რომელსაც შეუძლია გააცნობიეროს უფრო რთული კონტროლის ალგორითმები და გააცნობიეროს დიგიტალიზაცია, ქსელი და ინტელექტი.ამავდროულად, მას აქვს ხარვეზების გამოვლენისა და დაცვის სქემები, მათ შორის ძაბვის, გადაჭარბებული დენის, გადახურების, დაბალი ძაბვის და ა.შ.
სერვო მძღოლის კონტროლი დაყოფილია პოზიციის მარყუჟად, სიჩქარის მარყუჟად და დენის მარყუჟად მისი საკონტროლო ობიექტის მიხედვით გარედან შიგნით.შესაბამისად, სერვო დრაივერს ასევე შეუძლია პოზიციის კონტროლის რეჟიმი, სიჩქარის კონტროლის რეჟიმი და ბრუნვის კონტროლის რეჟიმი.დრაივერის მართვის რეჟიმი შეიძლება დაინიშნოს ოთხი გზით: 1. ანალოგური რაოდენობის დაყენება, 2. პარამეტრის დაყენების შიდა დაყენება, 3. პულსი + მიმართულების დაყენება, 4. კომუნიკაციის დაყენება.
პარამეტრის პარამეტრის შიდა პარამეტრის გამოყენება შედარებით ცოტაა და ის შეზღუდულია და ეტაპობრივად რეგულირდება.
ანალოგური რაოდენობის პარამეტრების გამოყენების უპირატესობა სწრაფი რეაგირებაა.იგი გამოიყენება ბევრ მაღალი სიზუსტით და მაღალი რეაგირების შემთხვევაში.მისი მინუსი ის არის, რომ არის ნულოვანი დრიფტი, რაც სირთულეებს იწვევს გამართვისას.ევროპული და ამერიკული სერვო სისტემები ძირითადად ამ მეთოდს იყენებენ.
პულსის კონტროლი თავსებადია საერთო სიგნალის მეთოდებთან: CW/CCW (დადებითი და უარყოფითი პულსი), პულსი/მიმართულება, A/B ფაზის სიგნალი.მისი მინუსი არის დაბალი რეაგირება.იაპონური და ჩინური სერვო სისტემები ძირითადად ამ მეთოდს იყენებენ.
კომუნიკაციის პარამეტრი ამჟამად ყველაზე ხშირად გამოყენებული კონტროლის მეთოდია.მისი უპირატესობებია სწრაფი დაყენება, სწრაფი რეაგირება და მოძრაობის გონივრული დაგეგმვა.კომუნიკაციის დაყენების საერთო რეჟიმი არის ავტობუსით კომუნიკაცია, რაც გაყვანილობას მარტივს ხდის და დივერსიფიცირებული საკომუნიკაციო პროტოკოლი ასევე აძლევს მომხმარებელს მეტ არჩევანს.
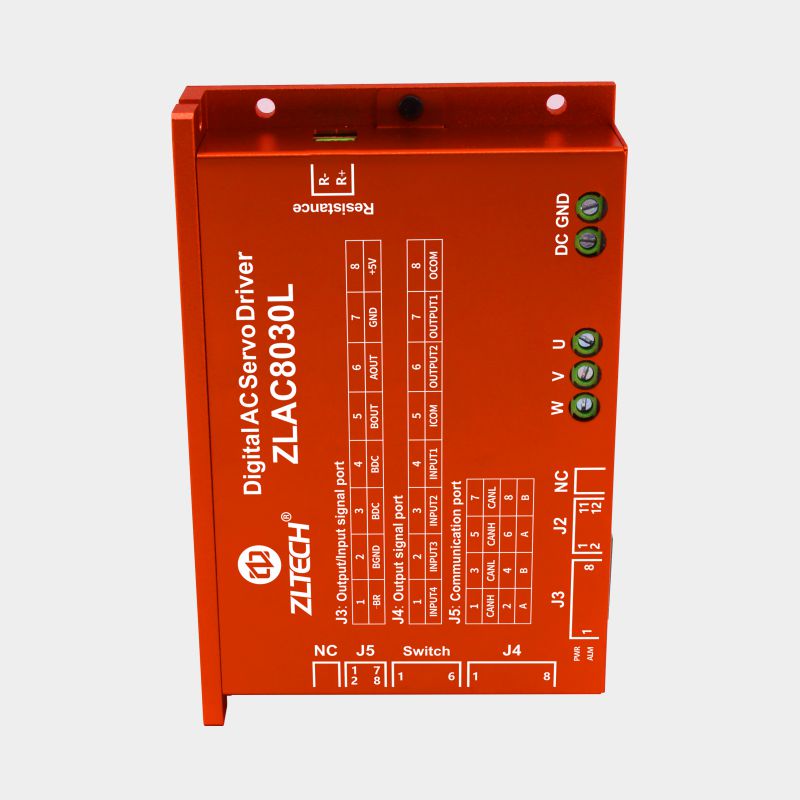
ZLAC8030 არის მაღალი სიმძლავრის და დაბალი ძაბვის ციფრული სერვო დრაივერი, რომელიც დამოუკიდებლად არის შემუშავებული.მის სისტემას აქვს მარტივი სტრუქტურა და მაღალი ინტეგრაცია.იგი ამატებს ავტობუსის კომუნიკაციას და ერთღერძიანი კონტროლერის ფუნქციებს.იგი ძირითადად ემთხვევა 500W-1000W სერვო ძრავებს.
Პარამეტრები
| ᲞᲠᲝᲓᲣᲥᲢᲘᲡ ᲡᲐᲮᲔᲚᲘ | SERBO დრაივერი |
| P/N | ZLAC8030L |
| სამუშაო ძაბვა (V) | 24-48 |
| OUTPUT CURRENT(A) | რეიტინგული 30A, MAX 60A |
| კომუნიკაციის მეთოდი | CANOPEN, RS485 |
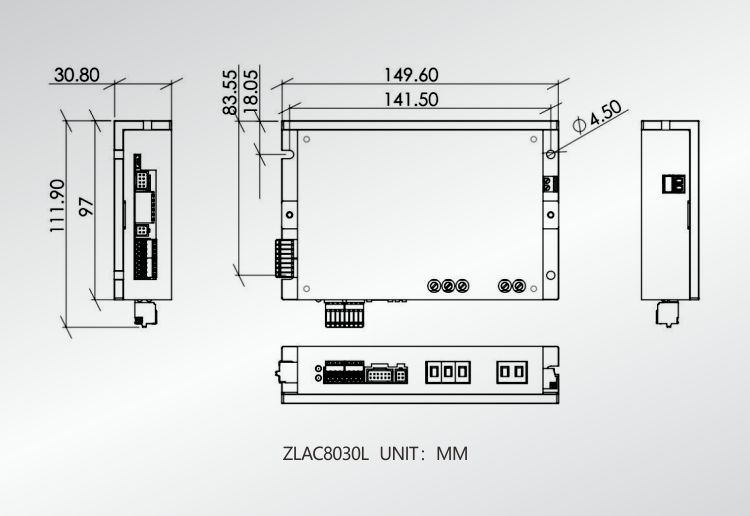
| DIMENSION (მმ) | 149.5*97*30.8 |
| ადაპტირებული HUB SERVO MOTOR | მაღალი სიმძლავრის HUB SERVO MOTOR |
განზომილება
განაცხადი

შეფუთვა

წარმოების და ინსპექტირების მოწყობილობა

კვალიფიკაცია და სერტიფიცირება

ოფისი და ქარხანა

თანამშრომლობა

პროდუქტების კატეგორიები
-

ZLTECH 3ფაზიანი 60მმ Nema24 24V 100W/200W/300W/40...
-

ZLTECH 42mm 24V 1.5A 0.5Nm CANopen ინტეგრირებული ...
-

ZLTECH 6.5 დიუმიანი 24V-48V 150W 120 კგ BLDC ელექტრო...
-

ZLTECH 9.5 დიუმიანი 48V 20N.m კვანძის ძრავა სოფლის მეურნეობისთვის...
-

ZLTECH Nema23 შიფრატორი CANopen ინტეგრირებული საფეხურები...
-

ZLTECH Nema17 0.5/0.7Nm 18V-36V ინტეგრირებული საფეხური...





